


A high-precision positioning method for open-pit mine vehicles based on improved HMM deviation correction algorithm
-
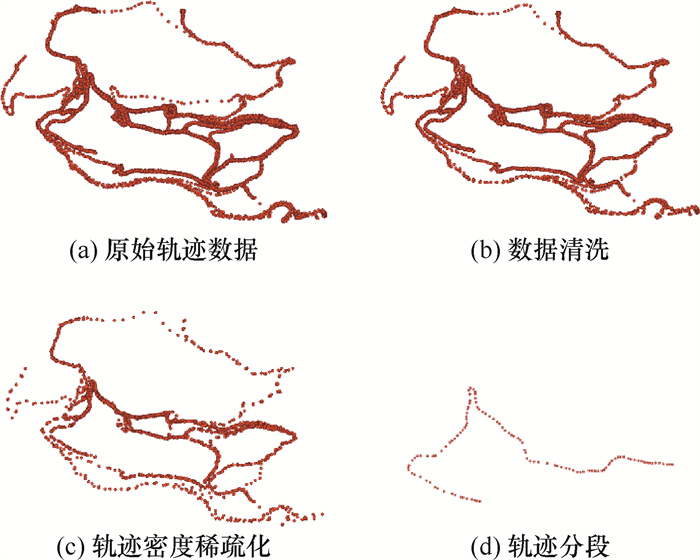
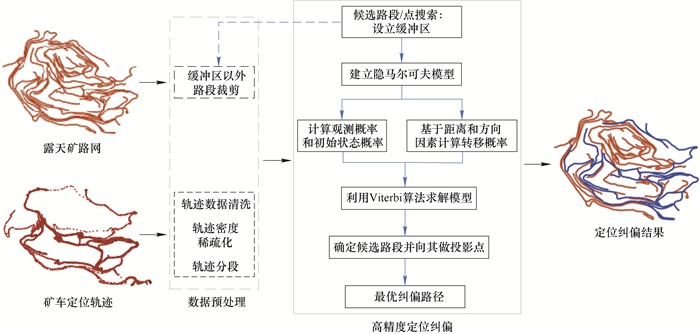
摘要: 针对露天矿区复杂路网背景下容易出现车辆定位偏差,严重影响生产车辆路径规划和智能调度的问题,提出了一种基于改进隐马尔可夫模型的露天矿车辆高精度定位纠偏方法。通过对构建的露天矿复杂路网地图进行路段裁剪处理以及对矿车定位轨迹数据清洗、密度稀疏化和分段处理等,建立缓冲区搜索轨迹候选路段点,从而提高复杂路网下矿车定位纠偏效率;通过计算矿车定位观测概率和转移概率建立定位纠偏HMM优化模型,并结合Viterbi算法计算最优纠偏结果,实现对露天矿车的高精度定位纠偏。研究结果表明,该方法纠偏效果优于原始HMM定位纠偏方法,纠偏准确率可达到89.2 %,平均纠偏时间仅需0.055 s,能够实现对复杂背景下露天矿车辆定位坐标的有效纠偏。Abstract: Vehicle location deviation could easily occur in complex road network of open-pit mines, which seriously affect production vehicle route planning and intelligent scheduling.In this light, this study proposed a method for high-precision positioning and rectification of open pit minecars based on an improved HMM(Hiddden Markov Model).Specifically, this study clipped the road section by the complex road network map of the constructed open-pit mine, and cleaned the positioning trajectory data of the minecart, whose density was sparsed and segmented; a buffer zone was established to search for candidate road points of the trajectory, so as to improve the efficiency of the minecart positioning and correction under the complex road network; the HMM optimization model of positioning deviation correction was established by calculating the positioning observation probability and transition probability of the minecart.The optimal deviation correctionwas conducted in combination with the Viterbi algorithm to achieve high-precision positioning and deviation correction of the open-pit minecart.Results indicate that the method produces a better correction effect than the original HMM positioning correction method, the correction accuracy can reach 89.2 %, and the average correction time is only 0.055 s.This could effectively correct the positioning coordinates of open-pit mine vehicles under complex backgrounds.
-
Key words:
- open pit mine /
- positioning correction /
- Hidden Markov model /
- Viterbi algorithm
-

图 1 露天矿车高精度定位纠偏模型总体架构
Figure 1. Overall architecture of high precision positioning correction model for open-pit mine truck

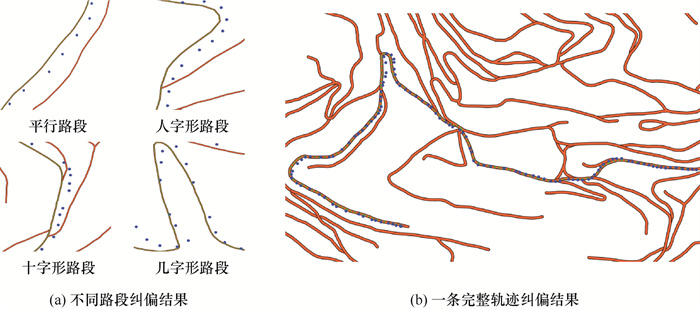
图 10 露天矿车高精度定位纠偏结果
Figure 10. High precision positioning correction results of open-pit mine truck

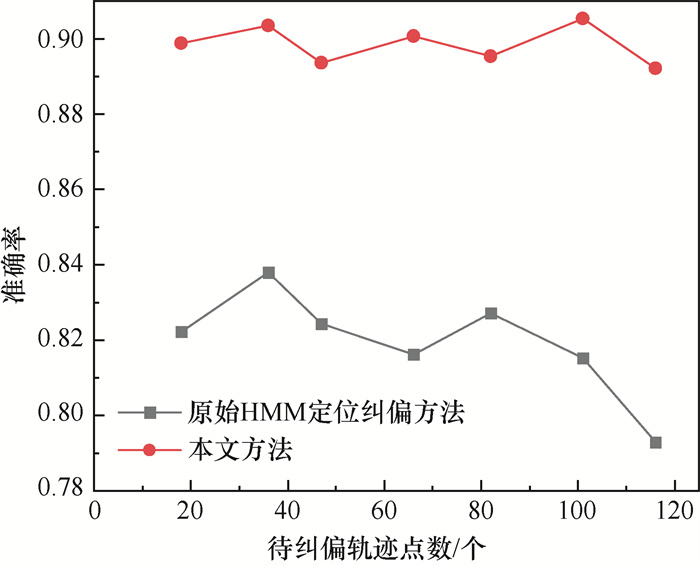
图 11 原始HMM与本文方法纠偏准确率对比
Figure 11. Comparison of correction accuracy between original HMM and proposed method

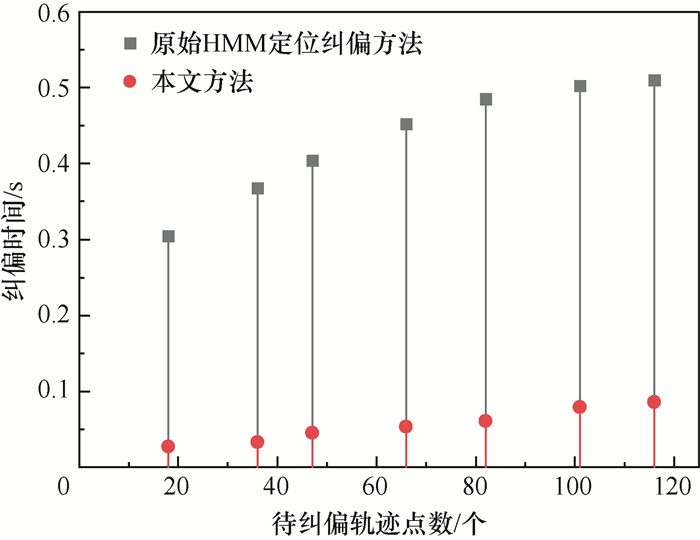
图 12 原始HMM与本文方法纠偏时间对比
Figure 12. Comparison of correction time between original HMM and proposed method
表 1 参数对应表
Table 1. Parameter correspondence table
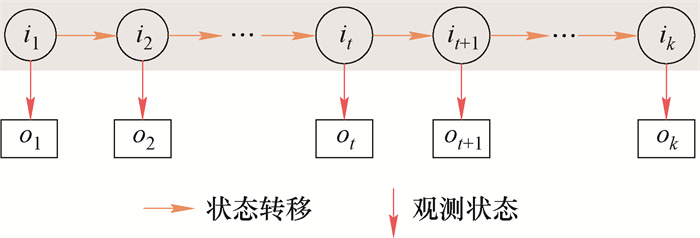
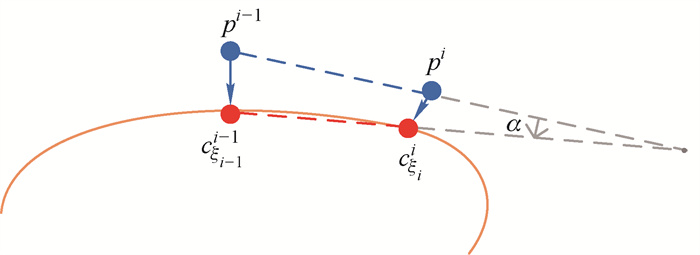
参数 公式 本文参数的含义 隐藏状态Q Q={q1,q2,…,qN},N为隐藏状态数量 露天矿车实际所在的道路位置信息 可观测状态V V={v1,v2,…,vM},M为观测状态数量 定位系统终端接收到的露天矿车定位信息 状态转移序列A A=[aij]N×N,aij=P(it+1=qj|it=qi)为状态qi转移到状态qj的概率 露天矿车前后两个定位坐标点与其对应的车辆实际道路位置点之间的关系越接近,转移概率就越大 状态观测序列B B=[aij]N×M,bij=P(ot=vj|it=qi)为状态qi生成观测值vj的概率 定位坐标点距离候选路段越近,观测概率就越大 初始状态概率向量τ τi=P(i1=qi),$\sum_\limits{i=1}^N \boldsymbol{\tau}_i=1$ 露天矿车某段轨迹初始位置点的概率,即该定位坐标点的观测概率  下载: 导出CSV
下载: 导出CSV
表 2 不同路段下纠偏前后的定位精度
Table 2. Positioning accuracy before and after the correction of deflection under different road sections
路段结构 平均定位精度/m 该方法纠偏后定位精度/m 平行路段 6.465 0.049 人字形路段 7.261 0.024 十字形路段 6.674 0.082 几字形路段 6.213 0.008
下载: 导出CSV
表 3 纠偏准确率对比
Table 3. Comparison of aorrection cccuracy
定位纠偏方法 轨迹点总数N/个 正确纠偏轨迹点数T/个 纠偏准确率AC/% 原始HMM定位纠偏方法 2 430 1 927 79.3 本文方法 2 430 2 168 89.2
下载: 导出CSV
-
[1] 李学现, 顾清华, 阮顺领, 等. 考虑能耗动态变化的露天矿卡车运输最优路径规划[J]. 煤炭学报, 2021, 46(S1): 590-600. doi: 10.13225/j.cnki.jccs.xr20.1687Li Xuexian, Gu Qinghua, Ruan Shunling, et al. Optimal transportation path planning of truck in open-pit mine under dynamic energy consumption[J]. Journal of China Coal Society, 2021, 46(S1): 590-600. doi: 10.13225/j.cnki.jccs.xr20.1687 [2] 程平, 李晓光, 顾清华, 等. 露天矿新能源纯电动卡车的智能调度优化及应用[J/OL]. 金属矿山: 1-11[2022-12-24]. http://kns.cnki.net/kcms/detail/34.1055.TD.20211223.1738.002.html .[3] Husam K Salih Juboori Mohanad F Jwaid. Vehicles for open-pit mining with smart scheduling system for transportation based on 5G[J]. Turkish Journal of Computer and Mathematics Education: TURCOMAT, 2021, 12(5): 827-835. doi: 10.17762/turcomat.v12i5.1490 [4] Wang B Y, Han Y, Wang S Y, et al. A review of intelligent connected vehicle cooperative driving development[J]. Mathematics, 2022, 10(19): 3635. doi: 10.3390/math10193635 [5] 李星星, 张伟, 袁勇强, 等. GNSS卫星精密定轨综述: 现状、挑战与机遇[J]. 测绘学报, 2022, 51(7): 1271-1293. https://www.cnki.com.cn/Article/CJFDTOTAL-CHXB202207017.htmLi Xingxing, Zhang Wei, Yuan Yongqiang, et al. Review of GNSS precise orbit determination: status, challenges, and opportunities[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1271-1293. https://www.cnki.com.cn/Article/CJFDTOTAL-CHXB202207017.htm [6] Dong L J, Sun D Y, Han G J, et al. Velocity-free localization of autonomous driverless vehicles in underground intelligent mines[J]. IEEE Transactions on Vehicular Technology, 2020, 69(9): 9292-9303. doi: 10.1109/TVT.2020.2970842 [7] 朱递, 刘瑜. 一种路网拓扑约束下的增量型地图匹配算法[J]. 武汉大学学报: 信息科学版, 2017, 42(1): 77-83. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201701012.htmZhu Di, Liu Yu. An incremental map-matching method based on road network topology[J]. Geomatics and Information Science of Wuhan University, 2017, 42(1): 77-83. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201701012.htm [8] 唐炉亮, 靳晨, 杨雪, 等. 基于GPS时空轨迹的路网拓扑自动变化检测[J]. 武汉大学学报: 信息科学版, 2017, 42(10): 1381-1386. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201710006.htmTang Luliang, Jin Chen, Yang Xue, et al. Road network topology automatic change detection based on GPS spatio-temporal trajectories[J]. Geomatics and Information Science of Wuhan University, 2017, 42(10): 1381-1386. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201710006.htm [9] 谢博晖, 吴健平. GPS轨迹数据纠偏方法研究[J]. 计算机技术与发展, 2012, 22(7): 223-226. https://www.cnki.com.cn/Article/CJFDTOTAL-WJFZ201207064.htmXie Bohui, Wu Jianping. Research of map matching method for GPS tracking data[J]. Computer Technology and Development, 2012, 22(7): 223-226. https://www.cnki.com.cn/Article/CJFDTOTAL-WJFZ201207064.htm [10] 王浩岩, 刘远刚, 李少华, 等. GNSS高采样率路径增量地图匹配方法[J/OL]. 测绘学报: 1-15(2022-08-22)[2022-08-22]. http://kns.cnki.net/kcms/detail/11.2089.P.20220622.1739.002.html .[11] Huang Z F, Qiao S J, Han N, et al. Survey on vehicle map matching techniques[J]. CAAI Transactions on Intelligence Technology, 2021, 6(1): 55-71. doi: 10.1049/cit2.12030 [12] Chao P F, Hua W, Zhou X F. Trajectories know where map is wrong: an iterative framework for map-trajectory co-optimisation[J]. World Wide Web, 2020, 23(1): 47-73. doi: 10.1007/s11280-019-00721-w [13] Jiang L L, Chen C X, Chen C, et al. From driving trajectories to driving paths: a survey on map-matching Algorithms[J]. CCF Transactions on Pervasive Computing and Interaction, 2022, 4(3): 252-267. doi: 10.1007/s42486-022-00101-w [14] 于娟, 杨琼, 鲁剑锋, 等. 高级地图匹配算法: 研究现状和趋势[J]. 电子学报, 2021, 49(9): 1818-1829. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU202109019.htmYu Juan, Yang Qiong, Lu Jianfeng, et al. Advanced map matching algorithms: a survey and trends[J]. Acta Electronica Sinica, 2021, 49(9): 1818-1829. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU202109019.htm [15] 樊娜, 尉青青, 康军, 等. 基于动态加权的城市路网地图匹配算法[J]. 测控技术, 2018, 37(1): 154-158. https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS201801036.htmFan Na, Yu Qingqing, Kang Jun, et al. Map matching algorithm for urban road network based on dynamic weight[J]. Measurement & Control Technology, 2018, 37(1): 154-158. https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS201801036.htm [16] 滕志军, 张宇, 李昊天, 等. 复杂路网的自适应D-S证据理论地图匹配算法[J]. 吉林大学学报: 工学版, 2021, 51(2): 524-530. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202102016.htmTeng Zhijun, Zhang Yu, Li Haotian, et al. Adaptive D-S evidence theory map matching algorithm of complex road network[J]. Journal of Jilin University: Engineering and Technology Edition, 2021, 51(2): 524-530. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202102016.htm [17] 李卫东, 侯丽虹. 基于三次B样条曲线拟合的列车定位方法研究[J]. 控制工程, 2017, 24(1): 135-140. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201701024.htmLi Weidong, Hou Lihong. A study on the train positioning method based on cubic B-spline curve fitting[J]. Control Engineering of China, 2017, 24(1): 135-140. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201701024.htm [18] Xu H, Liu H C, Tan C W, et al. Development and application of an enhanced Kalman filter and global positioning system error-correction approach for improved map-matching[J]. Journal of Intelligent Transportation Systems, 2010, 14(1): 27-36. [19] Jagadeesh G R, Srikanthan T. Online map-matching of noisy and sparse location data with hidden Markov and route choice models[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(9): 2423-2434. [20] 吉晓冬, 瞿圆媛, 符世琛, 等. 基于SVD-Unscented卡尔曼滤波的掘进机行进调度纠偏研究[J]. 矿业科学学报, 2022, 7(3): 354-363. doi: 10.19606/j.cnki.jmst.2022.03.010Ji Xiaodong, Qu Yuanyuan, Fu Shichen, et al. Path tracking of mining boom road-header using SVD-Unscented Kalman Filtering[J]. Journal of Mining Science and Technology, 2022, 7(3): 354-363. doi: 10.19606/j.cnki.jmst.2022.03.010 [21] Grewal J K, Krzywinski M, Altman N. Markov models—hidden Markov models[J]. Nature Methods, 2019, 16(9): 795-796. [22] 王勇, 周松, 邢策梅. HMM的地名地址时空数据引擎构建方法[J]. 测绘科学, 2020, 45(10): 161-167. https://www.cnki.com.cn/Article/CJFDTOTAL-CHKD202010024.htmWang Yong, Zhou Song, Xing Cemei. The address spatiotemporal data engine building method based on HMM[J]. Science of Surveying and Mapping, 2020, 45(10): 161-167. https://www.cnki.com.cn/Article/CJFDTOTAL-CHKD202010024.htm [23] 曹士龙, 刘根友, 王生亮, 等. GPS超长基线解算的误差特性与精度分析[J]. 武汉大学学报: 信息科学版, 2023, 48(2): 260-267. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH202302009.htmCao Shilong, Liu Genyou, Wang Shengliang, et al. Bias characteristics and accuracy analysis of GPS ultra long baseline solution[J]. Geomatics and Information Science of Wuhan University, 2023, 48(2): 260-267. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH202302009.htm [24] Li C L, Fu Y C, Yu F R, et al. Vehicle position correction: a vehicular blockchain networks-based GPS error sharing framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 898-912. [25] 陈伟, 杜路遥, 孔海洋, 等. 面向智能网联汽车定位的协同地图匹配算法[J]. 交通信息与安全, 2021, 39(6): 162-171. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202106019.htmChen Wei, Du Luyao, Kong Haiyang, et al. A cooperative map matching algorithm for intelligent and connected vehicle positioning[J]. Journal of Transport Information and Safety, 2021, 39(6): 162-171. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202106019.htm [26] 刘子政, 李默颖, 黄长青, 等. 顾及速度约束的基于时间序列GPS漂移数据处理方法[J]. 测绘地理信息, 2017, 42(1): 14-18. https://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201701004.htmLiu Zizheng, Li Moying, Huang Changqing, et al. GPS trajectory data drift processing method based on time series considering velocity constraints[J]. Journal of Geomatics, 2017, 42(1): 14-18. https://www.cnki.com.cn/Article/CJFDTOTAL-CHXG201701004.htm -




 点击查看大图
点击查看大图
计量
- 文章访问数: 117
- HTML全文浏览量: 27
- PDF下载量: 14
- 被引次数: 0